Hexapod Make 3
May 3, 2021
Make 3

- uses old dynamixel RX28 servos.
- 18 dof
- RPLidar A1 2d Lidar
- Jetson Xavier NX
- Intel Realsense d455 depth camera
- runs openshc ROS package (https://github.com/csiro-robotics/syropod_highlevel_controller)
- tip ground contact sensors (tactile switches) using rosserial_arduino
- wrote a ROS node that publishes the tip sensor data in a format openshc understands.
- want to make it into a decent rough terrain crawler
- servos seem to reach thermal limit quickly - added fans to motors
- 2d and 3d slam using a 2d lidar and a depth camera with hector mapping and rtabmap packages
Videos
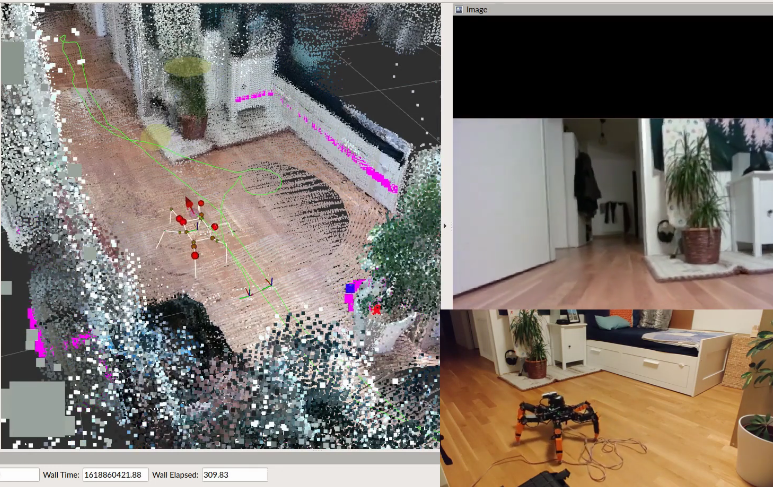
Indoor 3d SLAM with d455 and exploring various sensor data
Here I manually control the hexapod with a ps4 controller around the room. ROS master node is running on the bot on a Jetson NX. It has a 2D lidar and a Realsense depth camera. It runs the openshc package for hexapod control, and rtabmap for 3D SLAM. Visualization is done on a desktop machine on the same network.
Long video of testing the admittance controller
Short screen capture of exploring variables on rviz/rqt
Outdoor flat forest floor traverse test
Some Pictures
Side by side with Make 2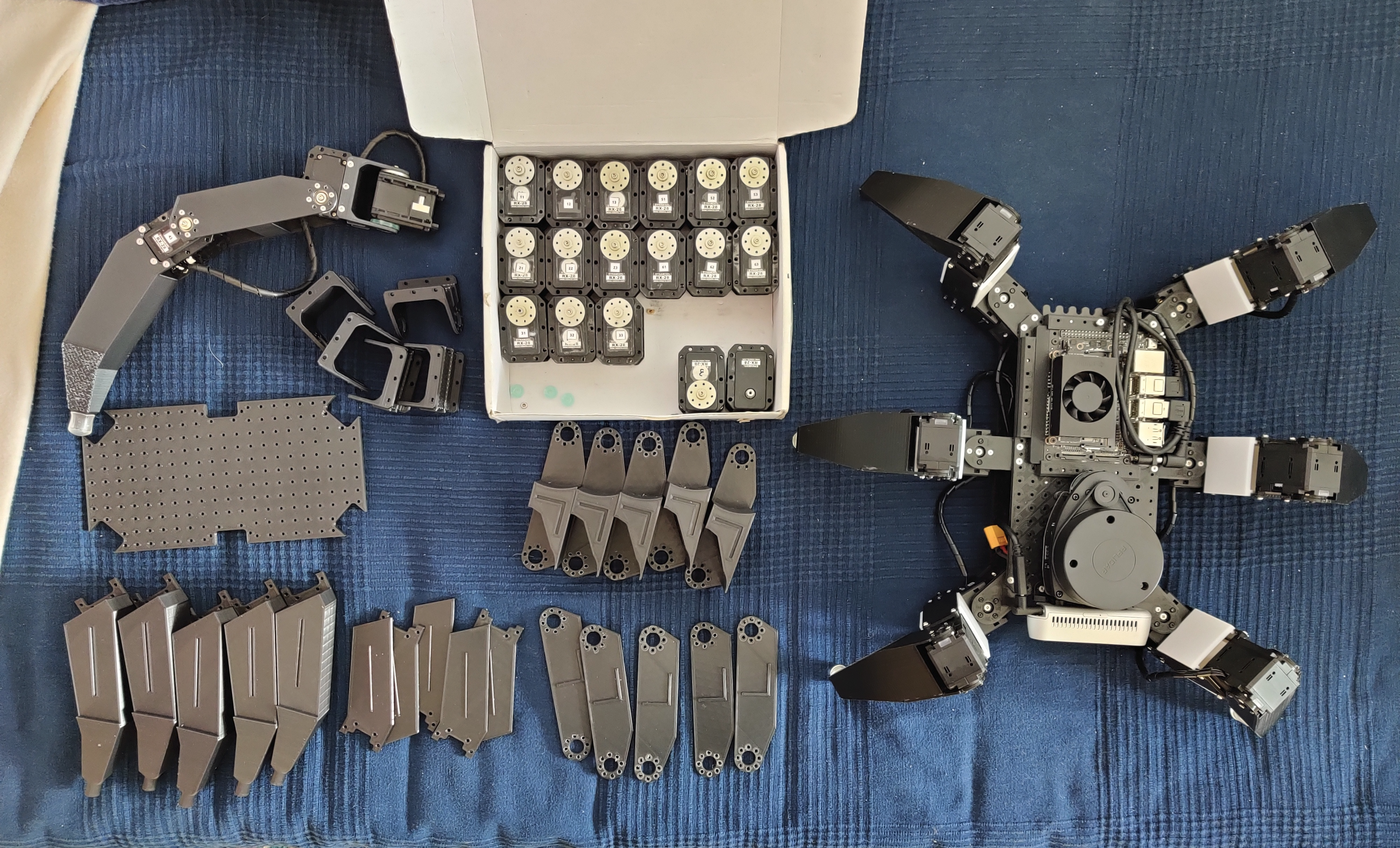
Assembled
Close up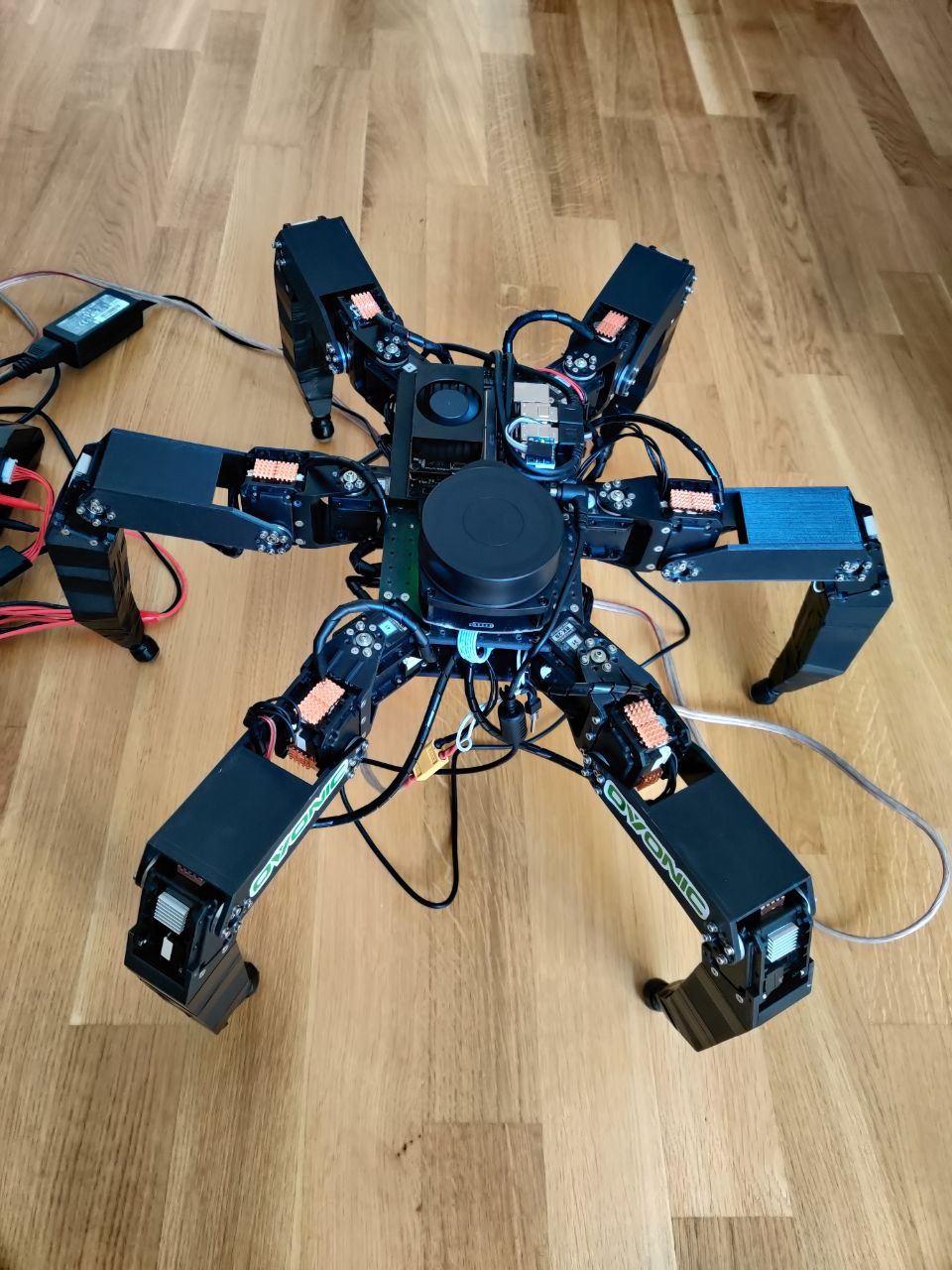
Visualization of topic data from openshc with rqt and rviz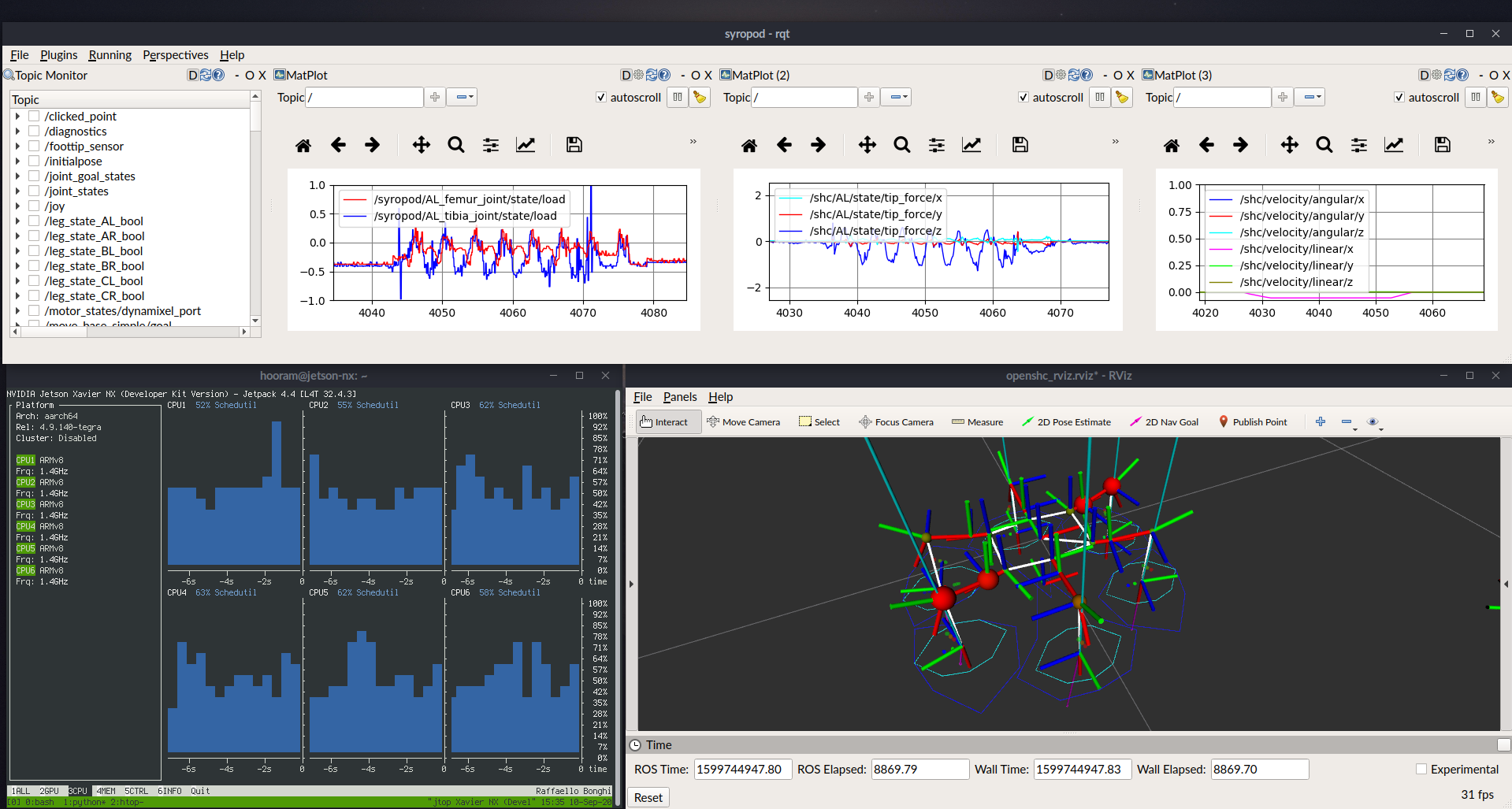
Added fans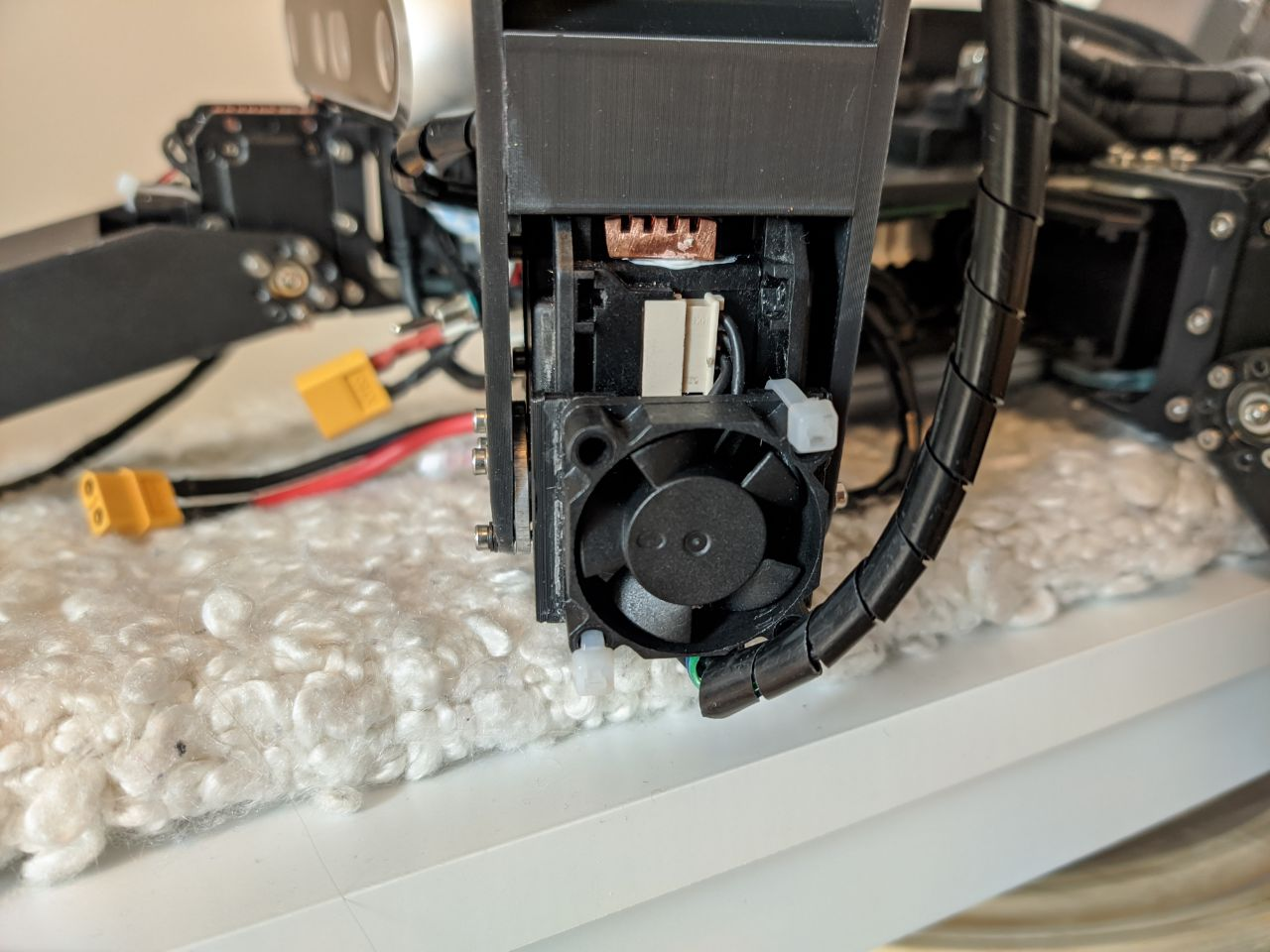
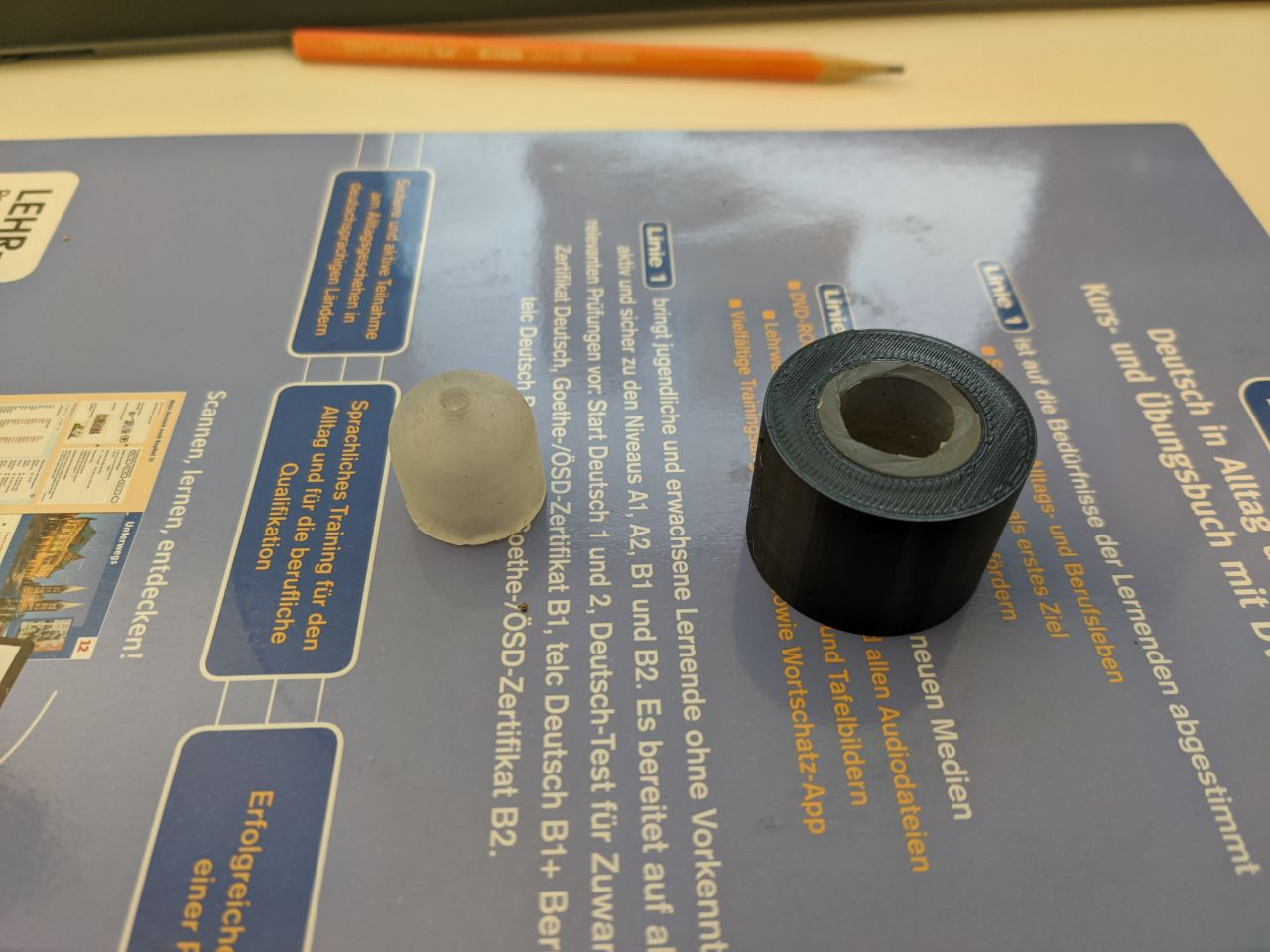
Silicon anti slip cap (and the mould)