Hexapod Make 1
May 3, 2021
Make 1

Inspired by Smallp Tsai’s hexapod v2.1 video
Drawings
Notes
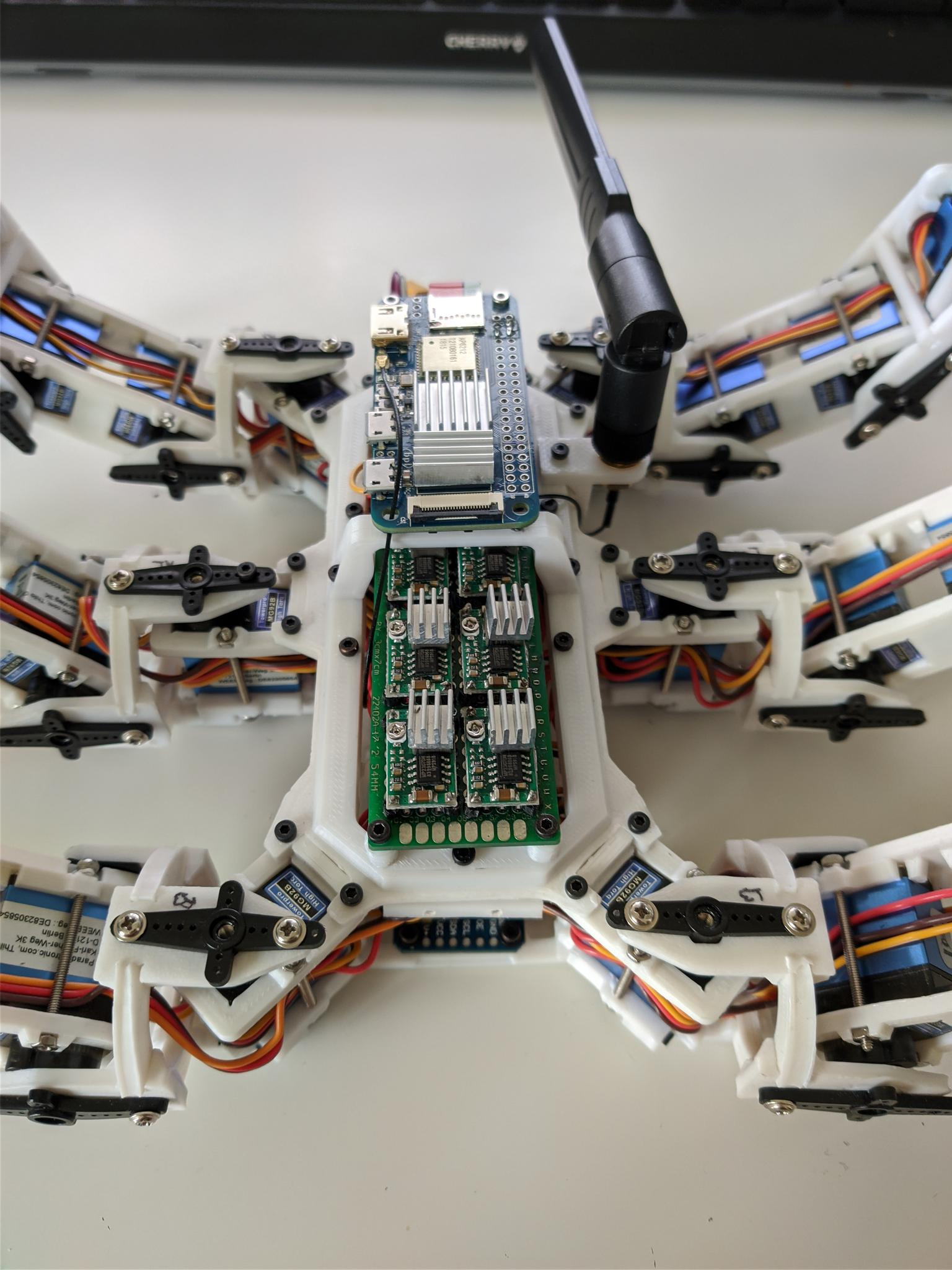
- used a raspberry pi zero sized board
- has an IMU
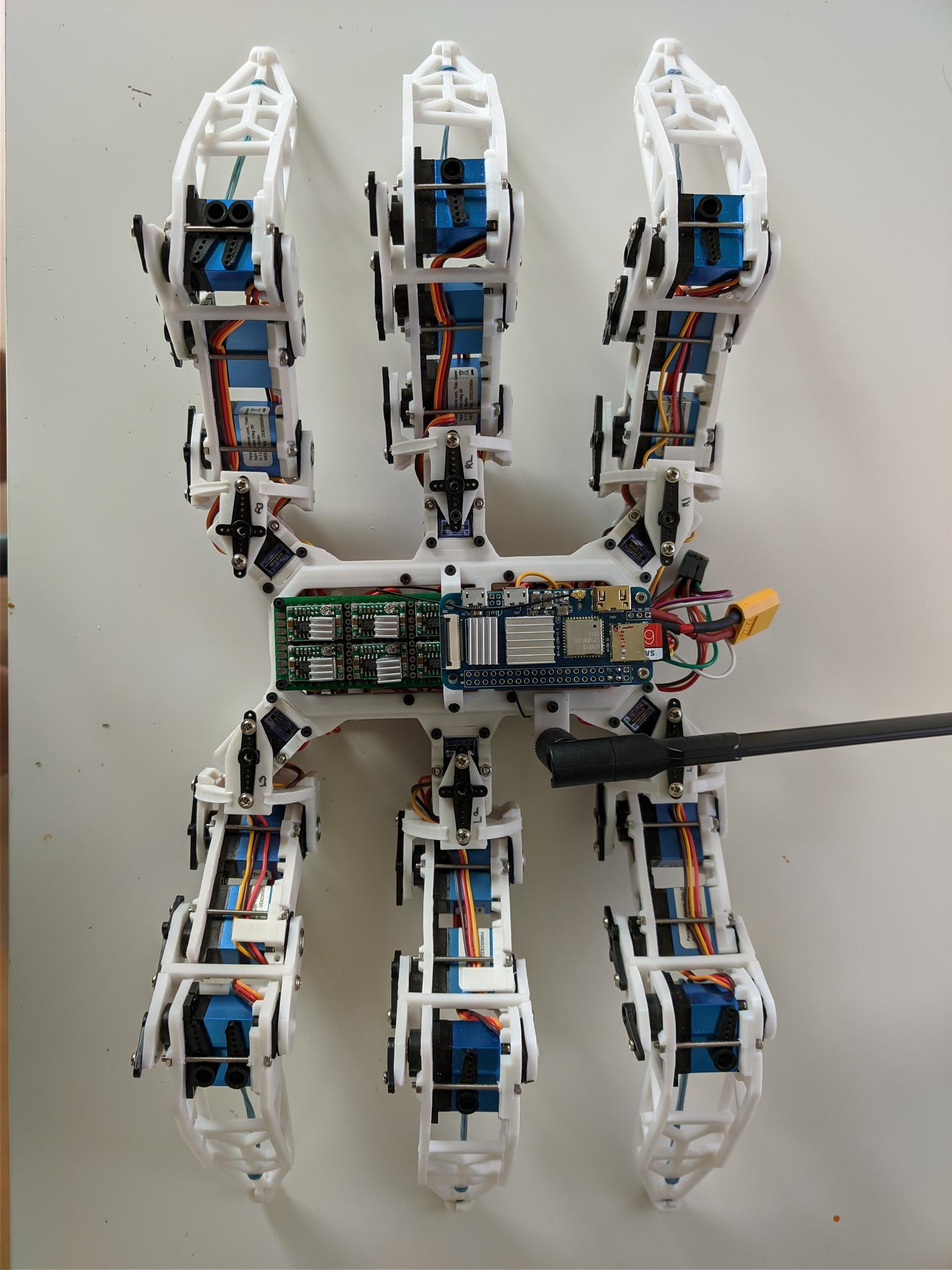
- 24 dof
- control software written in python using numpy, scipy, servo controller library.
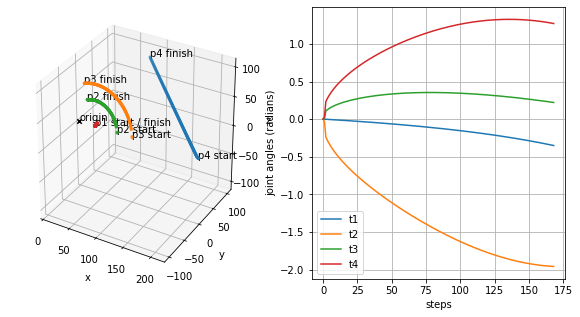
- 4dof legs -> no analytical solution for inverse kinematics. Implemented an iterative method for 4dof leg IK solution. Also can use an optimizer from scipy.optimize.
- basics of the endeffector position based control algorithm code in this jupyter notebook
- power system is janky - sometimes when the servos draw too much power at once, the sbc reboots.
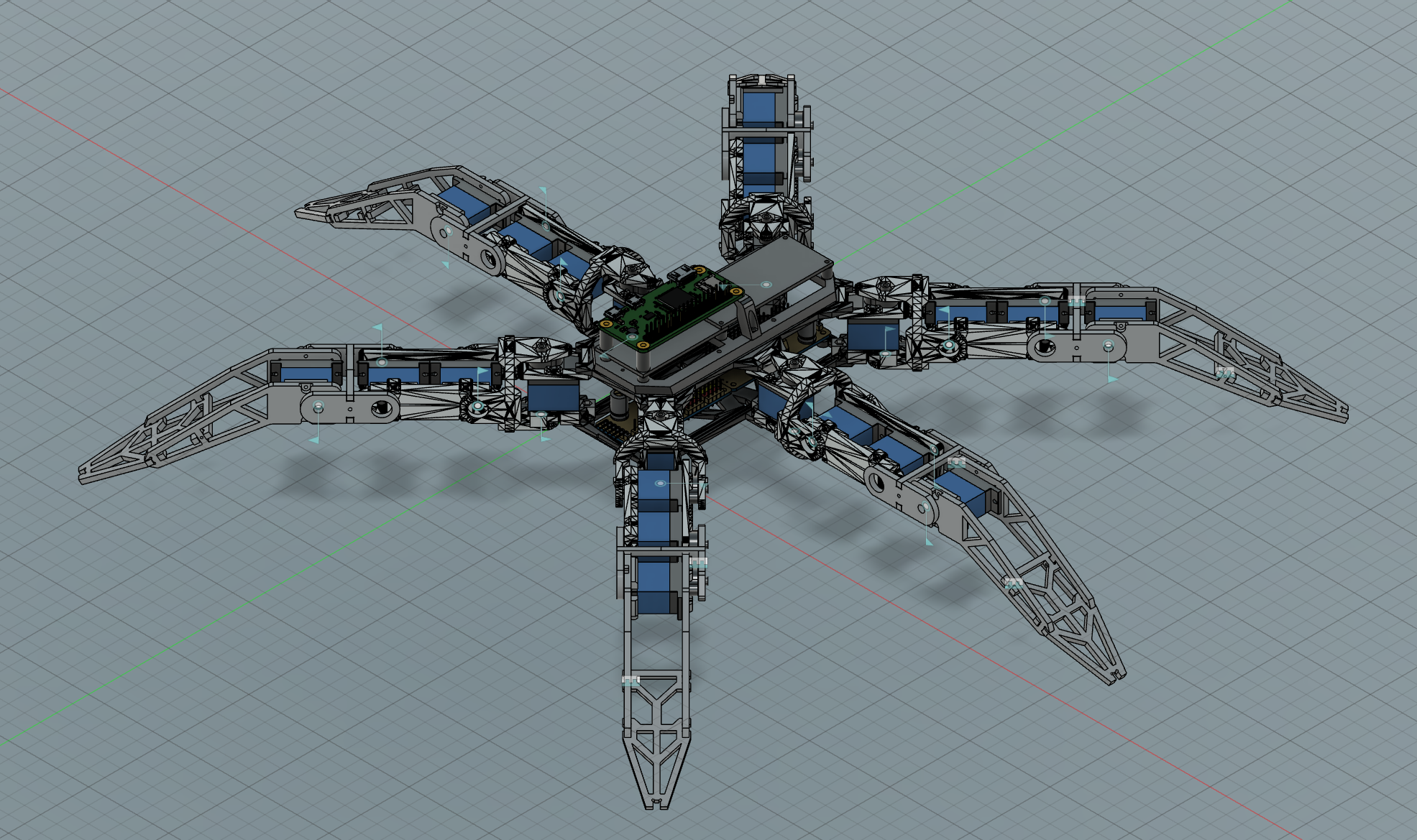
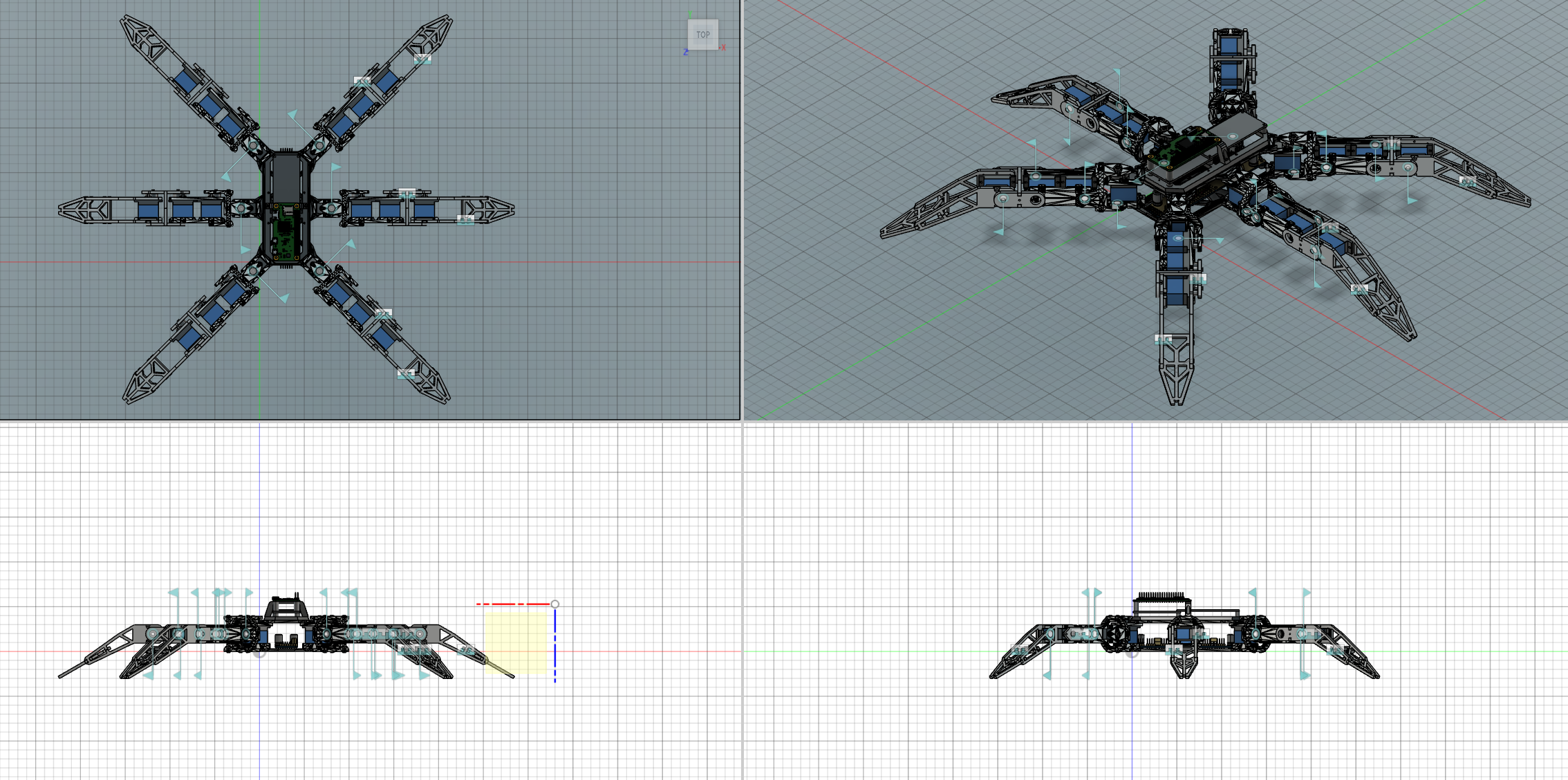
- learned to use Fusion360 to design parts needed using a 3D printer.
- parts:
- banana pi zero
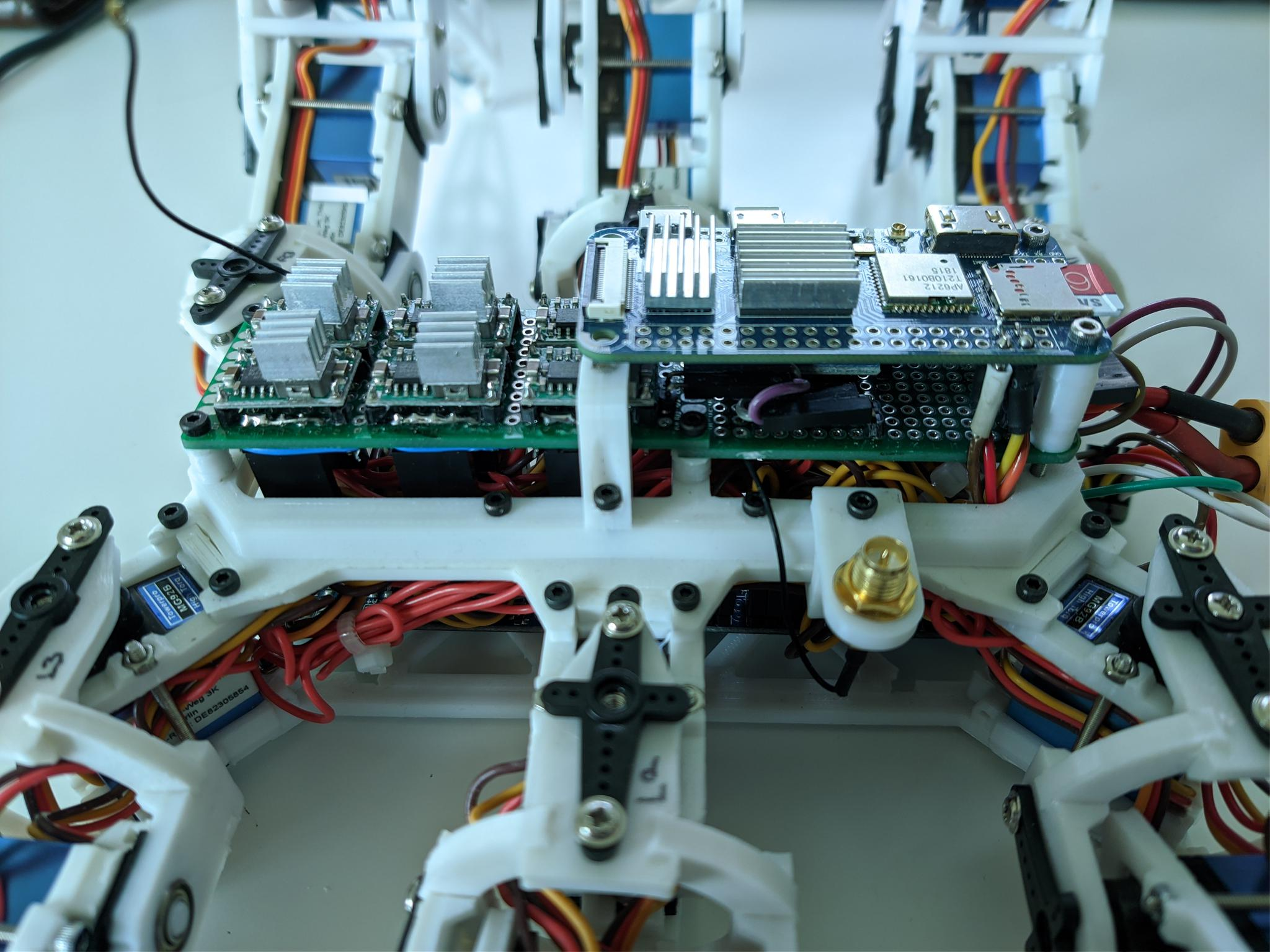
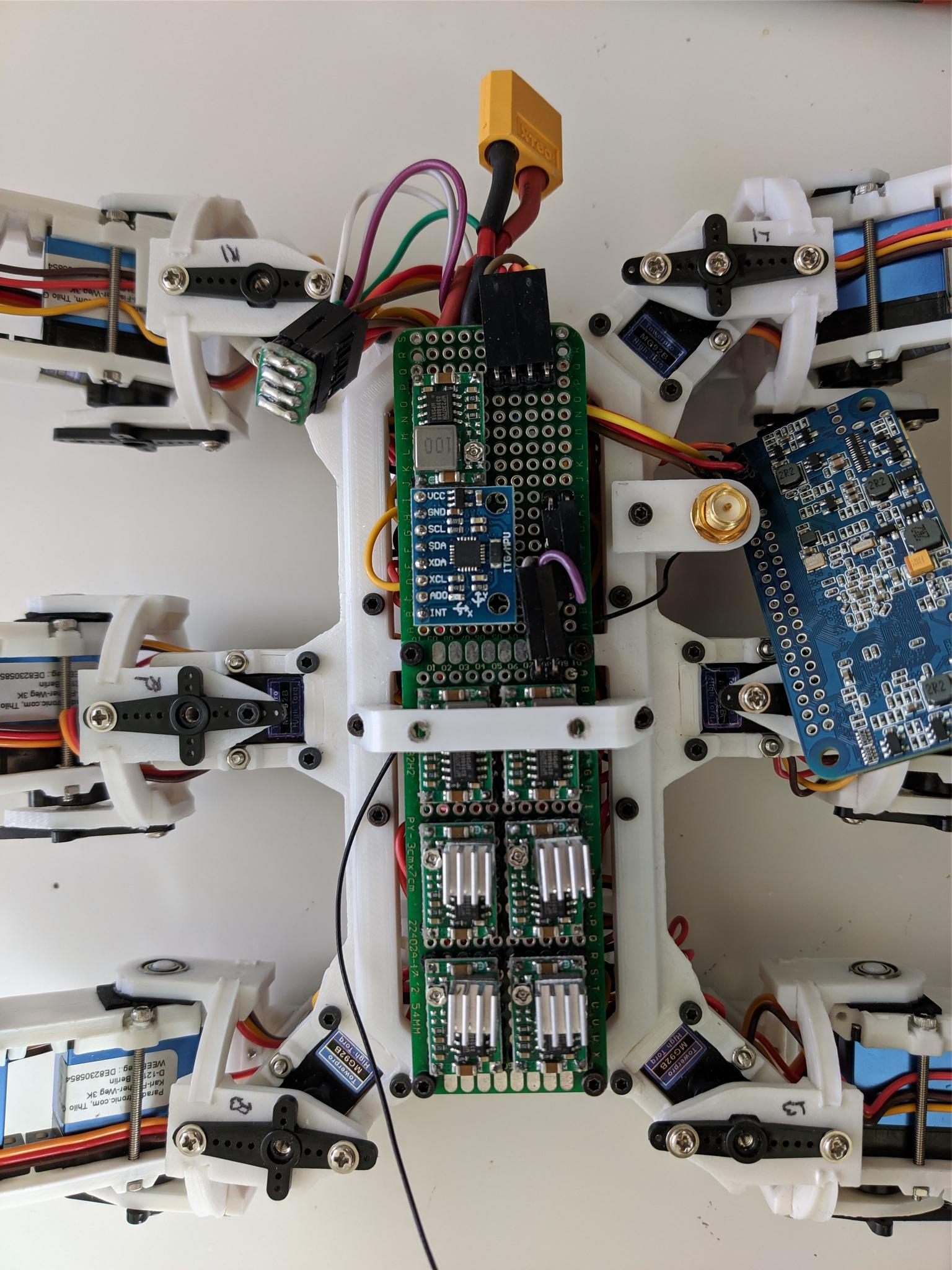
- 7x buck converter
- GY210 IMU
- 2s lipo
- 24x towerpro MG90B servos
- 2x 12ch pwm controller board
- one buck converter provides 5v to the sbc
- the servo controller boards get power from sbc
- four servos (one leg) get power from one buck converter
- sbc, servo controller boards, and the IMU talk through i2c
Pictures